Load Scenario
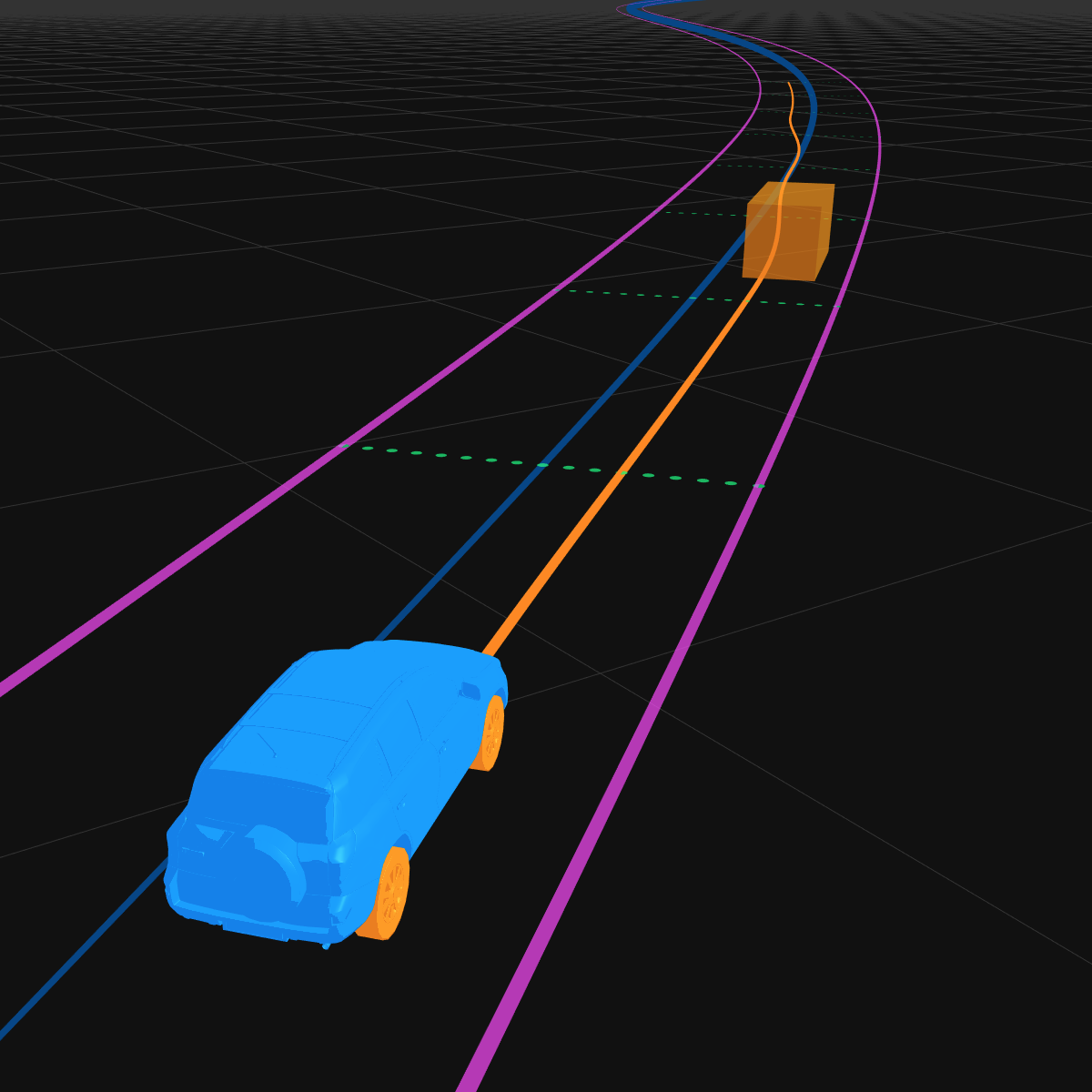
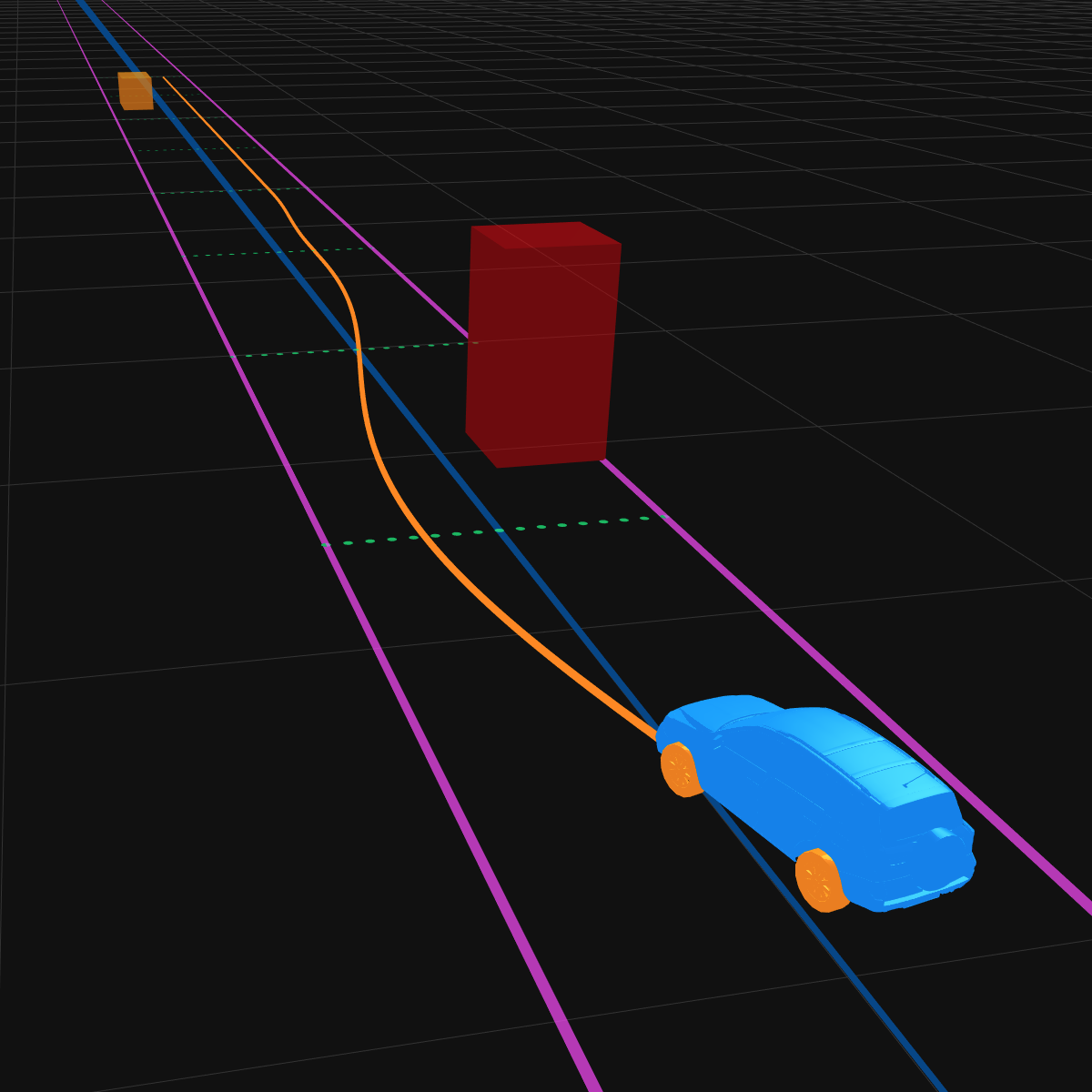
One-car overtake
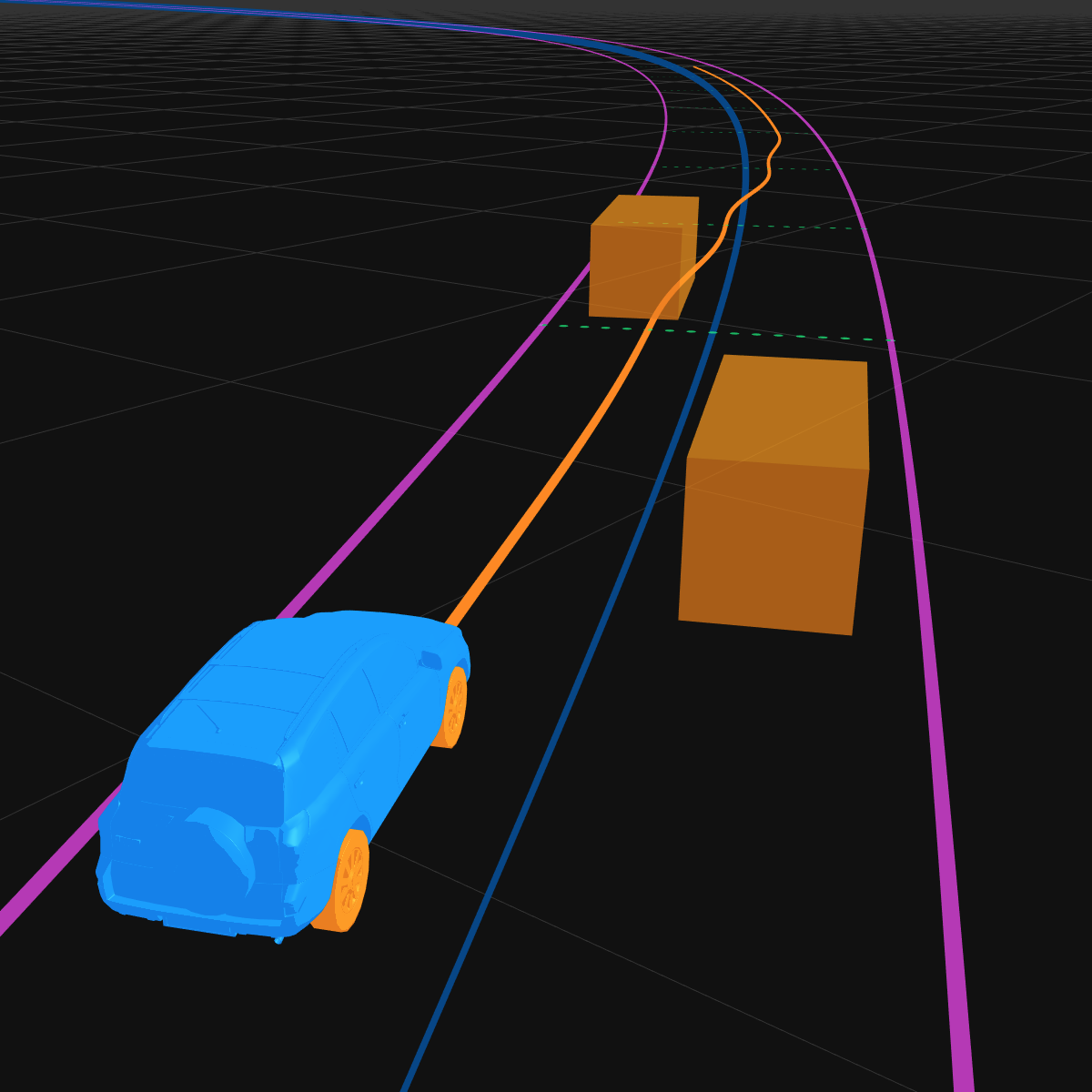
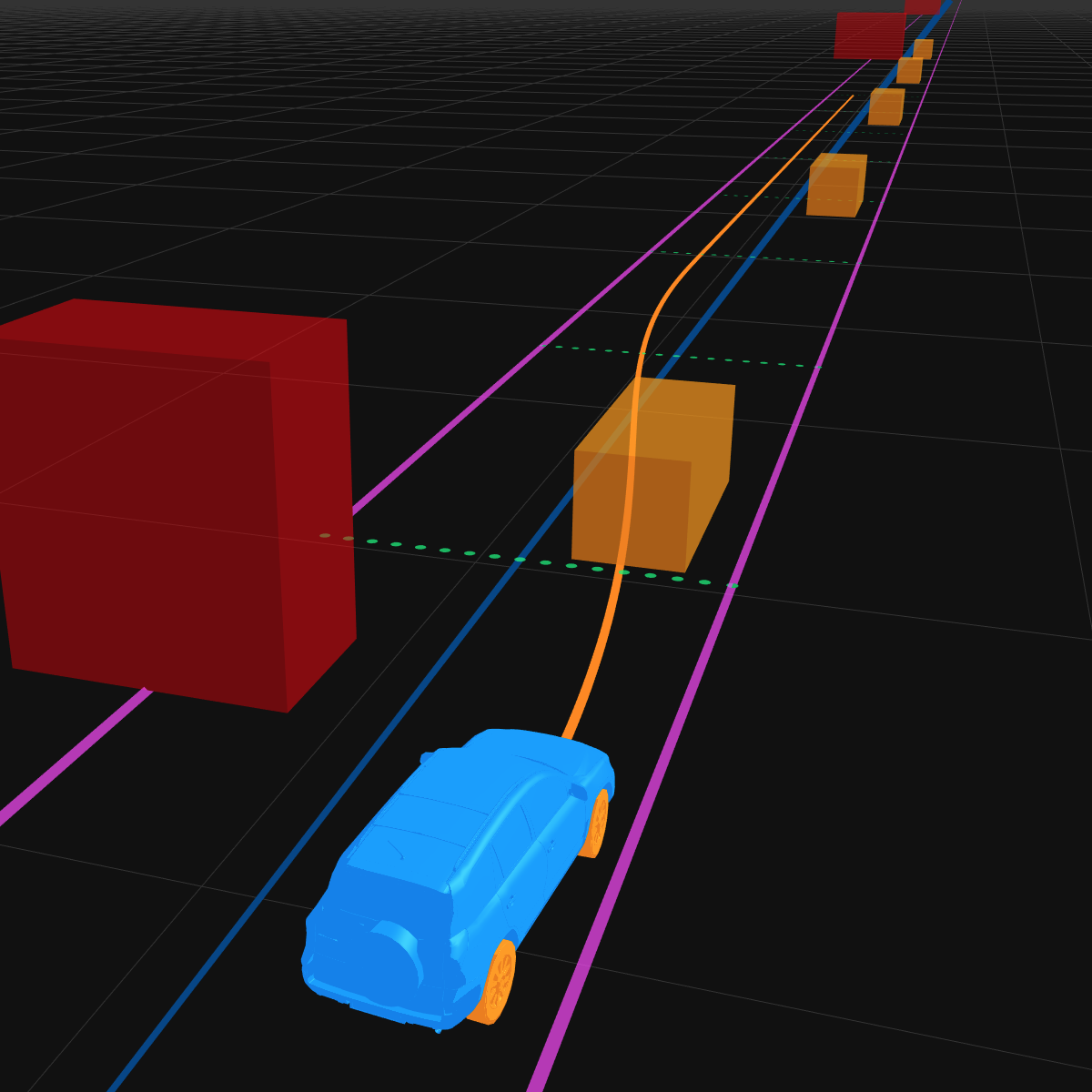
Two-car overtake
Rough road
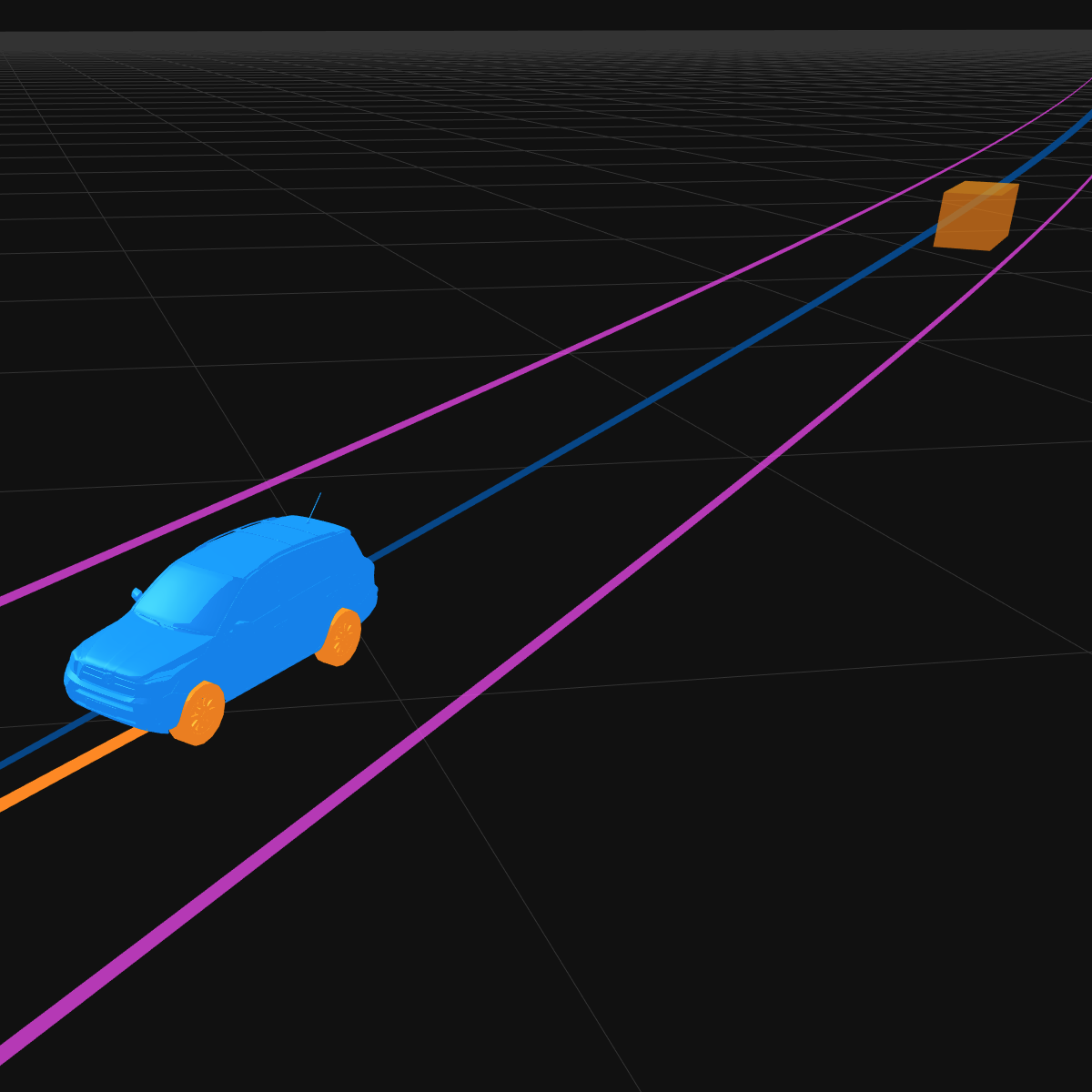
Dodging a speeder
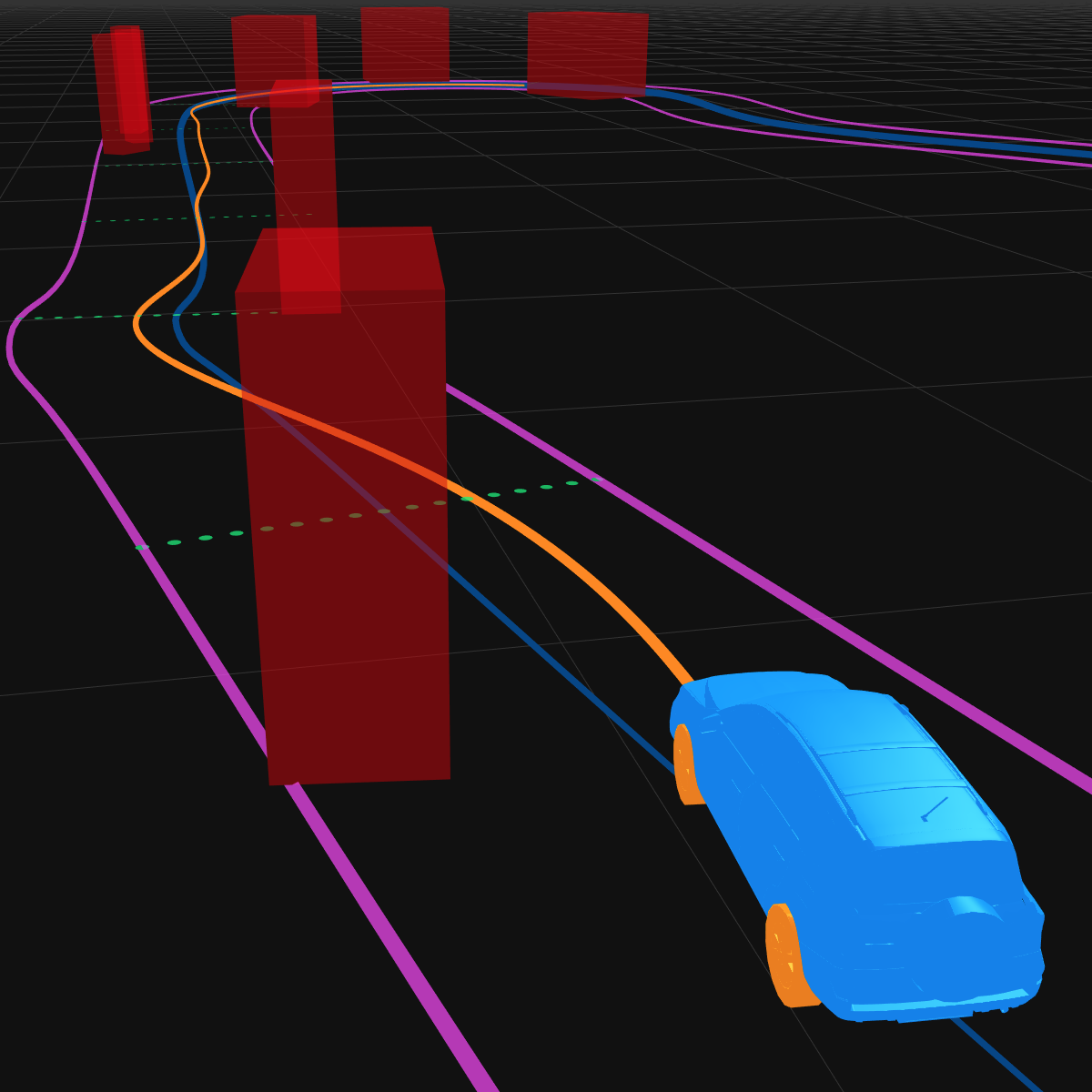
Lane blockage with oncoming traffic
Merging into slower traffic

Negotiating crosswalks
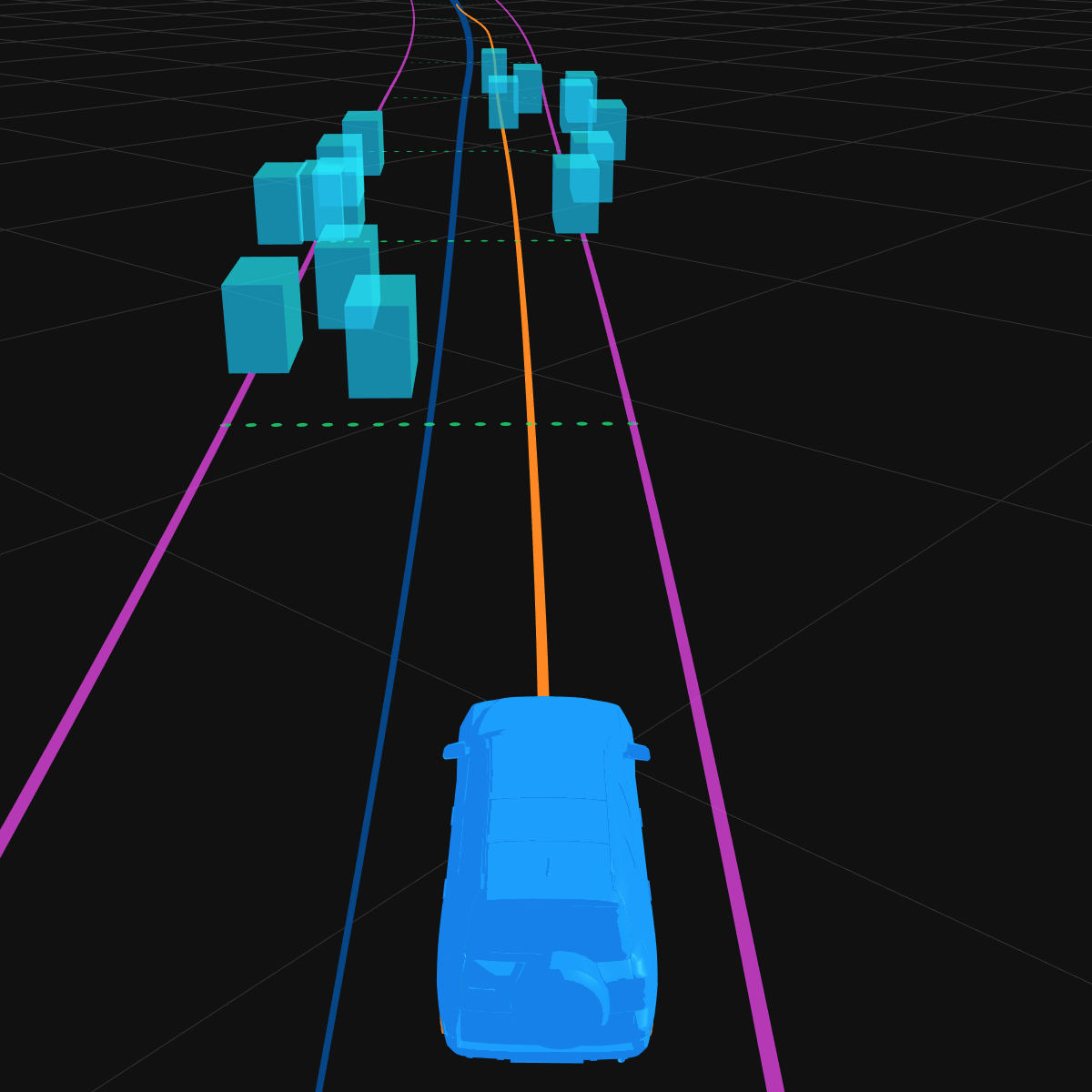
Chasing the peloton
Name
Saved Date